Autonomous Go-Kart
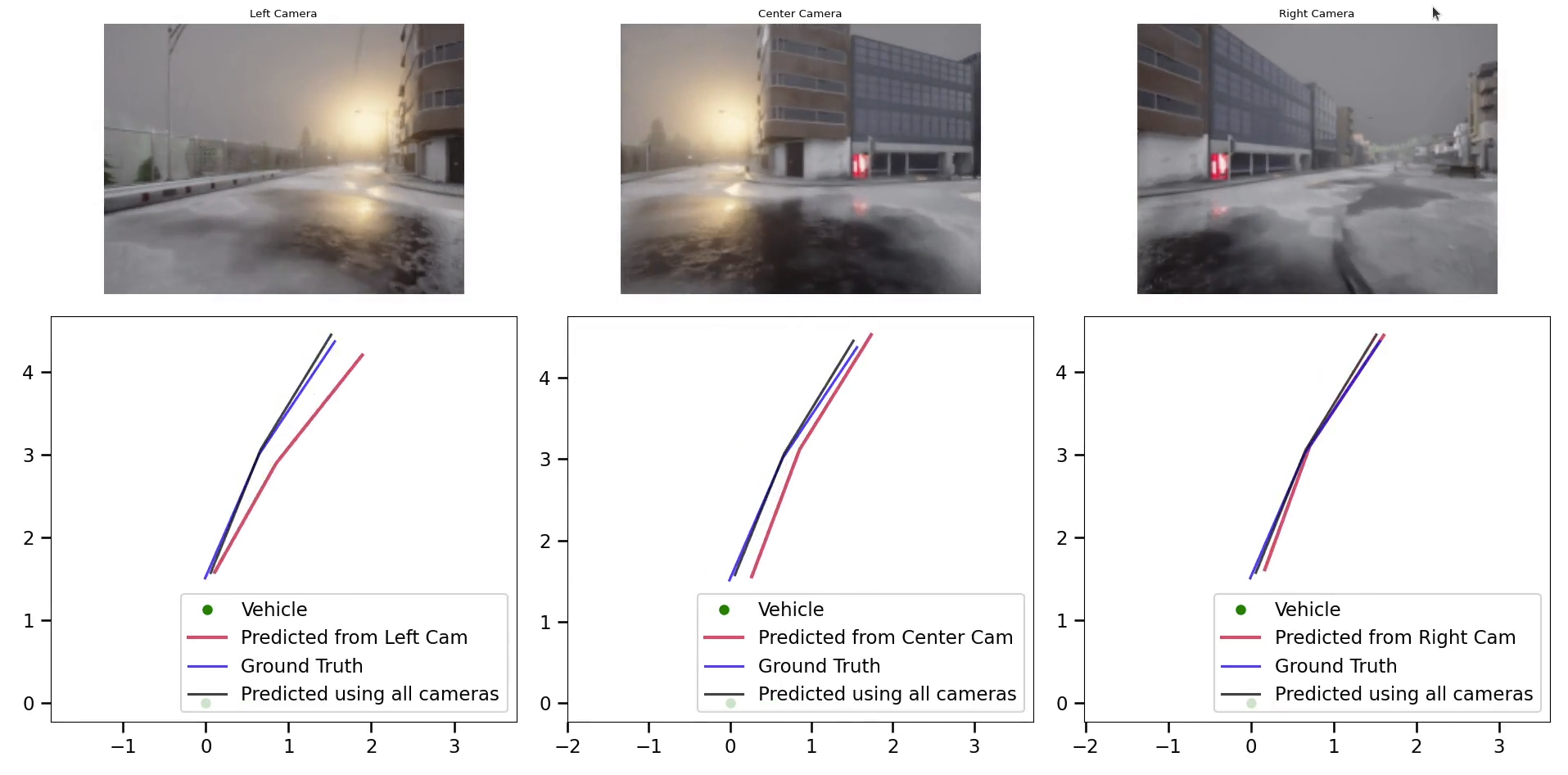
Building an autonomous go-kart with Autonomous Motorsports Purdue. Created a vision stack which beat the previous autonomous laptime record.
$5000+
Raised
2 Minute
Lap Time
3rd
Place
Read more →